Ознакомительная версия.
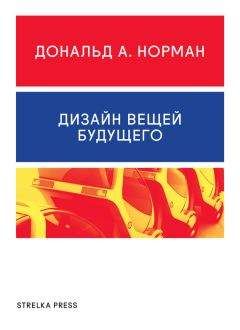
Рис. 3.2. Управление повозкой на конной тяге при отпущенных вожжах.
Если умное животное – лошадь – обеспечивает тягловую силу и держит направление, кучер может расслабиться и особо не управлять ею. Это пример контроля при отпущенных поводьях, когда лошадь действует вполне самостоятельно (снимок сделан автором в Брюгге, Бельгия)
Когда в Брауншвейге я управлял автосимулятором, разница между «отпущенными и натянутыми поводьями» была очевидна. При «натянутых поводьях» основной объем работы проделывал я – выбирал скорость, тормозил, крутил рулем. Однако машина ненавязчиво направляла меня, чтобы я не выезжал за пределы своей полосы. Если я приближался к впереди идущему автомобилю на опасное расстояние, руль слегка отодвигался назад, напоминая, что надо увеличить дистанцию. А если я слишком отставал, рулевая колонка сдвигалась вперед, призывая немного увеличить скорость. При «отпущенных поводьях» машина действовала энергичнее – настолько, что мне практически не приходилось брать дело в свои руки. Создавалось впечатление, что я могу закрыть глаза и полностью довериться автомобилю. К сожалению, время моего визита было ограничено, и я не опробовал всего, что, как я теперь понимаю, следовало бы опробовать. В частности, я так и не выяснил, каким образом водитель может выбирать уровень контроля. А ведь изменения здесь крайне важны, поскольку в чрезвычайной ситуации у человека может возникнуть необходимость быстро вернуть контроль себе, не отвлекаясь от происходящего.
Концептуализация связки «наездник + лошадь» – важное метафорическое средство, помогающее создавать интерфейсы «человек + машина», но его одного явно недостаточно. Нам необходимо больше знаний о подобных интерфейсах, и тот факт, что исследования в этой области уже ведутся, что ученые ищут пути наиболее эффективной передачи намерений человека системе (и наоборот), не может не обнадеживать.
Один из способов, позволяющих системе сообщить о своих целях и намерениях человеку – внятное предъявление избранной стратегии. Группа исследователей во главе с Кристофером Миллером предлагает, чтобы система делилась возможными сценариями («PlayBook») со всеми участниками. Ученые говорят, что в основе их разработок лежит «совместная используемая модель задач в соответствующей области. Эта модель обеспечивает коммуникацию между человеком и автоматом по поводу планов, целей, методов и использования ресурсов – дает что-то вроде установки на игру для спортивной команды. «PlayBook» позволяет оператору взаимодействовать с подчиненными ему системами так же гибко, как и с хорошо обученными подчиненными-людьми, обеспечивая тем самым адаптивную автоматизацию». Идея заключается в том, чтобы человек имел возможность сообщать системе о своих намерениях, выбрав один из конкретных «сценариев», которому она должна следовать, а если управление отдано системе, она должна предъявлять «сценарий», который сама избрала. Эта группа ученых занимается проблемой управления самолетами, поэтому в PlayBook может быть указано, как будет контролироваться взлет и набор высоты. Если система работает самостоятельно, полностью контролируя происходящее, она всегда показывает план, в соответствии с которым намерена действовать, чтобы человек понимал, как ее ближайшие действия вписываются в общую схему, и при необходимости мог изменить план действий. Важнейший элемент здесь – форма презентации. Письменное описание или список планируемых действий вряд ли приемлемы – для обработки информации, поданной в таком виде, требуется слишком много усилий. Чтобы система была эффективна, особенно для обычных людей, которые не захотят проходить специальную подготовку по обращению с «умными» машинами в собственном доме, важно, чтобы ее элементы подавались в простой и доступной форме.
Практическое воплощение подобных концепций я наблюдал на дисплеях больших коммерческих копировальных машин, когда на экран выводится соответствующий «сценарий»: например, пятьдесят копий в дуплексном режиме, на обеих сторонах страницы, отсортированные и сброшюрованные. Мне приходилось видеть прекрасные графические описания процесса. Изображение листа бумаги переворачивается, показывая, что копирование идет с обеих сторон, затем мы видим, как отпечатанный лист ложится на другие, и становится ясно, правильно ли сортируются копии (показано, как укладываются листы – вдоль или поперек). Наконец, на дисплее появляется стопка готовых документов, уже прошитых скрепками, – по ее высоте можно судить, скоро ли закончится копирование.
Когда автоматические устройства работают относительно самостоятельно, в режиме «отпущенных поводьев», отображение операций на дисплее особенно важно, ведь оно позволяет понять, какой стратегии придерживается машина и насколько она продвинулась в выполнении задания.
Делфт – очаровательный голландский городок на побережье Атлантики, там находится Делфтский технический университет. Улицы там узкие, а деловой квартал окружен большими каналами. Пешая прогулка от гостиницы до университета – настоящее удовольствие: идешь вдоль каналов, пересекаешь их по мостам, петляешь по узким кривым улочкам. Здесь вам угрожают не автомобили, а велосипедисты, которых в городе великое множество. Они носятся на огромной скорости во всех направлениях, внезапно появляясь перед вами, словно из-под земли, по крайней мере меня они заставали врасплох. В Голландии велосипедисты не ездят по проезжей части или тротуарам, для них существуют отдельные дорожки. Но на главной площади Делфта все обстоит по-другому – там велосипедисты смешиваются с пешеходами.
«Это абсолютно безопасно, – уверяли меня представители принимающей стороны, – только не надо „помогать“ велосипедистам. Не пытайтесь от них увернуться. Не останавливайтесь, не шарахайтесь в сторону. Ведите себя предсказуемо». Иными словами, не надо замедлять ход и менять направление. Велосипедисты тщательно просчитывают траекторию движения, чтобы не столкнуться друг с другом и с пешеходами, и это работает, если не происходит ничего неожиданного. Но когда пешеход пытается уклониться от едущего навстречу велосипеда, дело кончается плохо.
Рис. 3.3. В Голландии очень многие пользуются велосипедами: это, конечно, очень экологично, но чревато некоторым риском для пешеходов, пытающихся перейти площадь. Основное правило в таких ситуациях: действуйте предсказуемо, не пытайтесь облегчить жизнь велосипедистам. Если вы остановитесь или шарахнетесь в сторону, столкновения не избежать (фото автора)
Велосипедное движение в Делфте – пример того, как мы могли бы взаимодействовать с «умными» машинами. В конце концов в данном случае человек (пешеход) действительно взаимодействует с «умной» машиной – велосипедом, то есть с парой «велосипед + человек», где последний обеспечивает и разум, и движущую силу. Таким образом, и пешеход, и пара «велосипед + человек» обладают всей мощью человеческого разума, но тем не менее они не в состоянии координировать свои действия. У пары «велосипед + человек» есть разум, но нет возможностей для коммуникации. Велосипедов много, и движутся они быстрее, чем пешеходы. Пообщаться с велосипедистом невозможно, когда он оказывается на расстоянии достаточно близком, чтобы его окликнуть, разговаривать уже поздно. В отсутствие возможностей для контакта единственный способ взаимодействия – это предсказуемое поведение пешехода. Координации в этом случае не требуется, здесь планирует и действует только пара «велосипед + человек».
Приведенный мною пример очень полезен для дизайна. Если человек не может согласовать свои действия с «умной» машиной, управляемой другим человеком (пара «велосипед + человек»), можно ли надеяться, что ему будет легче координировать их с «умной» машиной, работающей без участия человека? Мораль: не стоит даже и пытаться. «Умные» машины будущего не должны пытаться читать мысли людей, с которыми они взаимодействуют, угадывать их мотивы и прогнозировать их действия. Причин, по которым этого не стоит делать, две: во-первых, машина может ошибиться и, во-вторых, такое гадание делает ее действия непредсказуемыми. Когда человек пытается предугадать, что собирается делать машина, в то время как она сама пытается понять, что собирается делать человек, ни к чему, кроме неразберихи, это привести не может. Вспомним делфтские велосипеды, которые наглядно иллюстрируют главное правило дизайна – будь предсказуемым.
Но тут возникает другая дилемма: кто должен действовать предсказуемо – человек или «умная» машина? Если бы они оба обладали одинаковыми способностями и уровнем интеллекта, это не имело бы значения. Именно так обстоит дело с велосипедами и пешеходами. Разумом в обоих случаях наделен человек, а значит, не важно, кто должен действовать предсказуемо – велосипедист или пешеход. Если они договорятся о том, кто какую роль играет, все будет хорошо. Однако в большинстве случаев эти два компонента не равны. Разум и общие познания людей намного превосходят интеллект и знания машин. Пешеходы и велосипедисты обладают определенным объемом общих знаний или общей основой: единственная проблема связана с отсутствием времени для установления контакта и координации действий. Если же речь идет о человеке и машине, то тут общей основы просто нет, поэтому куда лучше, чтобы предсказуемо вела себя машина, предоставляя человеку адекватно реагировать на ее действия. Вот где может пригодиться идея «сценария», которая поможет людям понять, какими правилами руководствуется машина.
Ознакомительная версия.