При этом лампа HL2 должна загореться, a HL2 – погаснуть. Устойчивое состояние, когда транзистор VT1 закрыт, VT2 открыт, поддерживается цепями отрицательной обратной связи точно так же, как в триггере с раздельными входами. Напряжение на базе закрытого транзистора VT1 положительно, а на его коллекторе – отрицательно, поэтому диод VD1 закрыт и база этого транзистора отключена от входа триггера (путь сигналу через конденсатор СЗ блокирован).
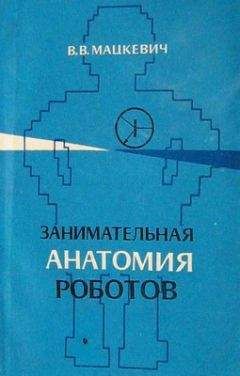
Рис. 73 Структура обучающегося робота – манипулятора
В то же время наличие отрицательного напряжения на базе открытого транзистора VT2 (около – 0,4 В) и на его коллекторе (-0,2 В) приводит к открыванию диода VD2, тем самым вход триггера к базе транзистора VT2 подключается через конденсатор С4. Переключают триггер в другое состояние подачей на его вход положительного импульса. Для этого надо лишь кратковременно нажать на кнопку SB1. При каждом нажатии на кнопку SB1 на вход триггера со счётным входом поступает одиночный импульс положительной полярности.
Таким образом, триггер переключается положительными импульсами. Положительный и отрицательный перепады напряжения, снимаемые с Выхода 1 и Выхода 2, могут быть использованы для управления другими электронными устройствами. Положительный импульс на Выходе 1 появляется при поступлении на вход триггера каждого нечётного импульса, а на Выходе 2 – чётного импульса; триггер, следовательно, делит частоту поступающих на его вход импульсов на два. То есть коэффициент счета триггера К = 2. Мы уже говорили о том, что основным элементом ЭВМ, участвующим во всех вычислительных операциях, является триггер. На основе триггеров можно создать множество занимательных конструкций, например действующие модели светофоров, увлекательные кибернетические игры. В промышленности триггерные счётчики широко применяют в электронной измерительной аппаратуре с цифровой индикацией результатов измерений. Такие счётчики можно использовать и в роботе, например, для подсчёта проходящих мимо него деталей или людей.
Объединение механической системы робота – манипулятора с ЭВМ (рис. 73) позволяет создавать обучаемых роботов.
Робот действует по программе. Вначале изучают траекторию движения руки робота, затем «обучают» его самого и составляют программу самостоятельной работы. Кратко рассмотрим этапы обучения.
Перемещения, которые должна совершить рука робота, фиксируют при выполнении рабочей операции. Всю траекторию перемещения руки делят на отдельные движения. После этого приступают к «обучению» робота. С пульта оператор управляет роботом, и его рука совершает путь, соответствующий одному движению.
Движения, совершаемые рукой, фиксируют кодовые датчики (см. рис. 73) и сигналы в цифровом виде поступают на блок записи программы. Этот блок записывает программу на магнитный барабан памяти движения руки по пяти осям (три поступательных движения и два вращательных) в цифровом виде на пяти дорожках. После того как записано одно движение, приступают к записи другого. Заметьте, что робот запоминает с первого раза и удерживает в памяти до 180 команд и на столько времени, сколько это необходимо человеку.
Когда рука робота под руководством оператора проделала всю операцию и обучилась, т. е. в блоке памяти зафиксированы её движения, робот может многократно, уже без оператора, повторять движения рукой.
В последние годы электронной промышленностью созданы чудесные микроЭВМ и микропроцессоры. Благодаря низкой стоимости микропроцессора его стало возможным включить в большинство обычных машин и аппаратов. Любую машину микропроцессор может наделить способностью принимать решения, хранить в памяти программу работы и инструкции на различные ситуации, автоматически регулировать свою работу в зависимости от складывающихся условий.
В чём принципиальные преимущества использования в массовых объектах управления микропроцессоров и микроЭВМ?
Главное – малые габариты и потребляемая мощность, низкая стоимость микропроцессорных вычислительных систем, особенно так называемых однокристальных, у которых на одной кремниевой пластине объединены микропроцессор и запоминающие устройства. Уже одно это позволяет применять вычислительную технику в тех областях, где ранее вычислительные и управляющие машины были недоступны из-за «барьера стоимости» и сложности организации промышленного выпуска необходимого их количества. Благодаря малым размерам микропроцессорную систему можно легко разместить на станке, в кабине трактора, в корпусе робота – манипулятора, в магнитофоне, в телефонном аппарате.
10. На пути к созданию искусственного интеллекта
Для того чтобы поведение робота было целенаправленным, его «мозг» должен принять на себя функции системы центрального управления: командовать руками, ногами и другими системами, а также контактировать с окружающей средой, следить за её изменениями. Робот объединяет в себе систему восприятия информации из среды, систему искусственного интеллекта и систему выполнения своих механических действий. Поэтому таких мыслящих роботов и назвали интеллектуальными.
Интеллектуальный робот – это цельная искусственная система, способная соответственно вести себя при решении определённой задачи. Робот воспринимает информацию о внешнем мире, анализирует обстановку, принимает решение и сам его реализует. Чтобы осуществить эту сложную деятельность, робот, как и человек, должен планировать своё поведение. Это значит, что все поведение предварительно он должен разделить на отдельные поступки. Совершая поступки, робот непрерывно их контролирует и сравнивает с заданием. Если же поступок робота не соответствует заданию, он анализирует причины случившегося, принимает решение локального характера. На всём маршруте движения робот должен подчинять своё поведение достижению конечной цели.
Чтобы выполнить план своих действий, роботу нужно прежде всего иметь представление о внешнем мире. Если бы окружающая среда была статичной, было бы легко принимать решения и выполнять план своих действий. Однако она беспрерывно изменяется. В ней нельзя все запрограммировать, как и нельзя все предвидеть. Поэтому робот должен всегда получать информацию о состоянии внешнего мира. А для этого нужно построить внутреннюю модель реального мира. Эта модель представляет собой совокупность сведений о реальном мире, в котором функционирует робот.
Одни интеллектуальные роботы обладают большими способностями, другие – меньшими, но все они воспринимают внешний мир, строя свой, внутренний, и самостоятельно управляют своими действиями. Всех их объединяет одно преимущество перед остальными роботами – это способность самостоятельно «осмысливать» окружающую обстановку и соответственно с заданием действовать.
Принятие решений – важнейший этап процесса разумных действии
Итак, начало положено! Электронные вычислительные машины могут воспроизводить некоторые функции нервной системы человека. Один из создателей теории автоматического управления – Уильям Эшби по этому поводу сказал: «Мы знаем, что мозг и вычислительные машины представляют собой просто различные варианты в принципе одинаковых машин». Просто, да не совсем! Ещё очень многое из того, на что способен мозг человека, не под силу воспроизвести самым совершенным ЭВМ. Примером может служить распознавание различных предметов, шрифтов, речи, т. е. то, что сейчас именуют распознаванием образов.
В разумных действиях этот процесс является только ступенью общего процесса принятия разумного решения, который является важнейшим завершающим этапом деятельности мозга.
Для того чтобы создать машину, способную принимать решения, недостаточно довести её до фазы распознавания образов и анализа ситуации, а придётся ещё наделить её способностью окончательного выбора и принятия решения.
В последнее время на смену первым малоэффективным программам опознания пришли новые, более эффективные; наступил этап макетирования новых опознающих устройств – перцептронов (от слова «перцепция» – восприятие). В результате разработки технических моделей биологических анализаторов было создано несколько экспериментальных образцов перцептронов, предназначенных для автоматического восприятия и опознания зрительных образов. В принципе возможно создание перцептронов, моделирующих органы слуха, обоняния, осязания и других чувств.
Зрительный перцептрон более всего напоминает сетчатку глаза. В перцептроне имеется несколько слоёв «клеток», перерабатывающих сигналы; как и в сетчатке, эти слои соединены между собой сложными множественными связями; первичные сигналы перерабатываются таким образом, что на выходе перцептрона требуется значительно меньше элементов, чем на его входе. И на входе сетчатки глаза человека имеется 137 миллионов светочувствительных клеток, а на выходе – всего лишь миллион нервных клеток.